
I have been working with BIG robots for the past few years, a Humanoid robot weighing in at about 250+ pounds, a giant Kuka Robot, UR5 and UR10 (universal robot) -- This has been fascinating and very fun. I have been able to tinker with Valkyrie, NASA's Humanoid Robot -- but it has only been repairs and a few CAD deep dives in meetings. SO -- I set off to learn more about robotics in my spare time and found an AWESOME resource to do so. Makyourpet.com is a youtube channel that has an open-source project that you can follow their short form 5 minute explainer videos and learn everything in between by just doing it and figuring out on the job. I highly recommend anyone interested in robots to pick this project up and have fun with it. I am professionally a software person but I LOVE getting hands-on. maybe one day ill be able to break into something that has both like set building.
First, Every part needed to be 3D Printed (and supplies needed to ship, like the motors, cables, and controller boards), so I finally installed my auto bed-leveler (BLtouch) on my Ender3v2. I set every file to do a bed level before the print because i knew i would be printing alot of items, and some I would be customizing so i needed to rapidly prototype. While everything was printing, I started to intialize each of the motors. I did this by printing off a range finder that attached to the body of the motor, and a needle that screwed onto the rotor. This allowed me to power the unit, move it around and write down its right and left range as well as leaving the motor in the middle position for attaching.
.jpg)
after a month and a half of printing, (a few days in actual print time, but you know, spare time) i was able to start rough fitting motors, screwing parts together and It was really starting to look like i was building a robot.

.jpg)
.jpg)
.jpg)
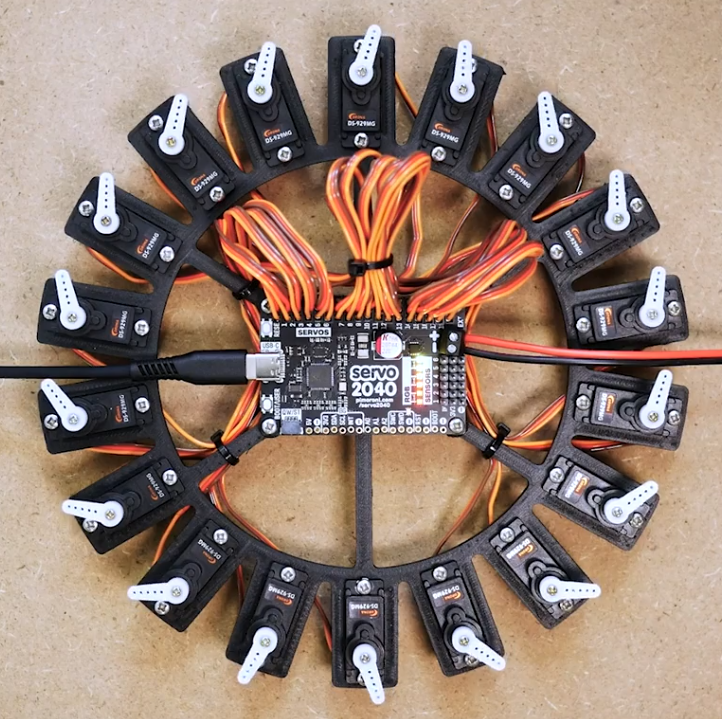
The original controller board was a polulu mini maestro 18-channel servo controller. This part gave me a bit of pause on the project as i was intimidated by having to also install a link chain of other boards like a channel relay module, a range current sensor and so on.. So the project sat 2 months as i did other things and worked up the courage to continue, when to my benefit and at the request of users of the project, The creator pulled through and implemented an open source board, the Pimoroni Servo 2040! which eliminated any fears i had and got me going back into the project because now everything was on one board.
I did not sit idly as i constantly thought about the project. While on the hiatus mentioned above, I began developing a camera holder and a handle that could attach to the robot. I originally wanted to use a Zed Mini Stereocam, but changed this descision later on as you will see --
.jpg)
So once i got back to the project I decided to start from (almost) scratch. I reprinted EVERYTHING.
.jpg)
.jpg)
I decided to mimic the color scheme of my work robot, and i planned a meetup for the two of them at some point. I also swapped from using PLA to a PETG (duramic is the brand) for durability and longer lasting parts. This set a fire in me and before i knew it, I had a robot sitting in front of me.
.jpg)
I soldered the parts and began wiringthe board and attaching the base parts together.
.jpg)
.jpg)
I finished the Handle/Camera Holder Design, Instead of them being seperate I combined them and ended on the OAK-D Pro W stereo camera (will implement the features from it at a later time).
With everything together, I loaded 2 apps on seperate phones, one app to be the brain of the robot and the other to control it. I loaded all of the values from the motors into the apps and the robot was moving
.jpg)
.jpg)
After testing things and making some minor adjustments as well as letting my kids play with dads new robot, i took it to work! Hexy was strapped into my vehicle and I was able to get Valyrie to pick up Hexy with the Handle that i custom made for the project! this video should pass through NASA's privacy boards soon and i will post it as soon as it happens. For months teams and student groups touring building 9 at JSC that came by our gantry were able to test this little robot, move her around everywhere and even go up and over some crazy obsticles. It was such a rewarding project and i have so many more plans like using the OAK-D to have facial recogniction for my kids to auto - follow them around and do even more, maybe even have them help me code some features to make this like their own pet. if you have any questions reach out to me!
.jpg)